Description
This project was largely inspired by the 2D stepper motor from bobricius on Hackaday. I loved the concept and thought I could build a Pong game from it. Little did I know that designing and driving this system would involve a lot of head-scratching and tinkering, but in the end it worked as imagined.
Design
With this project, I not only wanted to build a Pong game, but also to try the SMT assembly service from JLCPCB. That affected many component choices. A good example is the H-bridge IC. Since I do not speak Chinese, I could not fully read the datasheet and mostly hoped for the best.
Working principle
The basic principle is that of a stepper motor, unfolded into a linear plane. There are four connections for each paddle and eight for the ball (because it moves in both x and y). The PCB has two layers, used for x and y coordinates respectively.
Schematic
The schematic is fairly straightforward. Each linear stepper uses two H-bridge drivers. The remaining components connect the H-bridges, switches, and power supply to the STM microcontroller. Initially, I thought I would need many power resistors to drive the paddles. During software development, I found PWM to be very effective, so those resistors were not needed and I would omit them in a redesign.

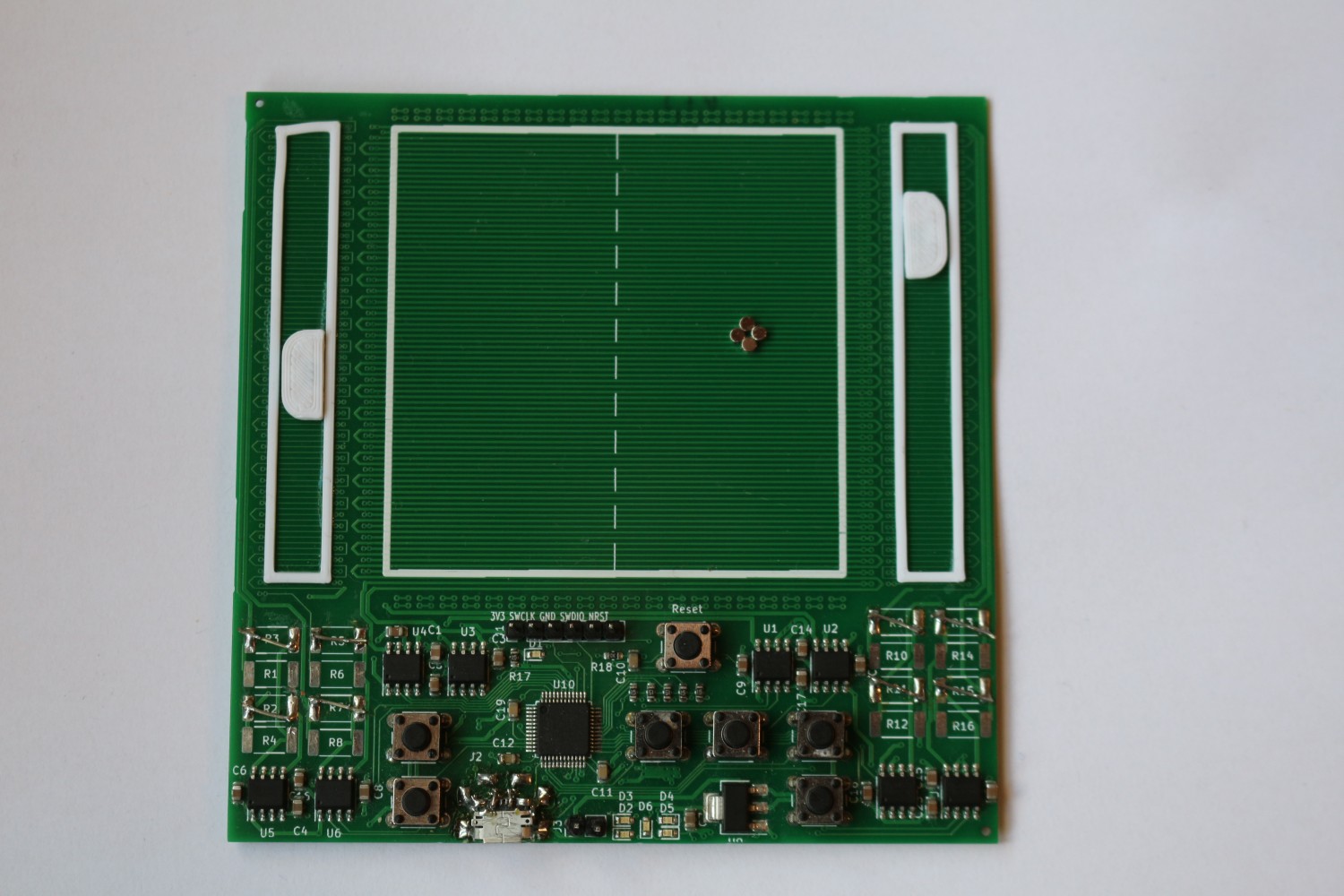
PCB
I spent a lot of time thinking about trace thickness. The bottom layer should have been a bit thicker to allow more current, since it is farther from the magnets than the top layer and therefore needs more current to achieve similar force on the ball. I targeted roughly 1 A and 1.5 A at 5 V, which worked quite well. Unfortunately, I made a mistake and ended up making the top layer thicker and the bottom layer thinner. At first I thought I would need to reorder the boards, but with trial and error I still got this version to work.
In a redesign, I would correct this mistake and make traces thicker in general. Testing also showed that PWM works very well. During design I was unsure, because I could not fully read the H-bridge specifications and the forces are modulated, but at around 30 kHz (to avoid audible noise), everything works fine.

Software
The STM32 software was written using STM32CubeMX, which was new to me because I had mainly used ATmega controllers before. The abstraction layer had pitfalls at first, but I quickly learned to appreciate it. I used many timers for PWM and game control.
Once I could control the ball reasonably reliably (dust or contamination can still cause lost steps), writing the game logic was straightforward. Getting to that point, however, took a lot of iteration:
- controlling the x-axis (top-side)
- almost frying my H-bridges in the process
- try adding the y-axis
- losing steps all the time on the y-axis
- almost frying my H-bridges again
- adding PWM to x and y
- noticing that drastically reducing current (through PWM) on the x-axis helped a lot as friction decreased
- tuning maximum step speed, PWM phase angles, PWM frequency,…
After a lot of debugging, I ended up with a functional version of the ball control. Controlling the paddles was comparatively easy, since they only use traces on the top layer.
Gamemodes
There is a two-player mode where players compete directly. The first person to reach 4 points wins. Points are displayed in binary using LEDs on the bottom of the PCB.
I also wrote a one-player mode. At the moment, the opponent plays flawlessly, so this mode is not very fun yet (but it was perfect for recording the video above). If I find some free time, I will probably change that.
Results
I am very happy with the result, as everything works quite well now. Playing with a physical object instead of on a screen changes the feel of the game in a very positive way.
I learned a lot while creating this game, and I hope other people enjoy it as well.
Write me a message if you want the source code. I also still have some unused boards at home, so feel free to reach out if you want one.